市百分百機(jī)電有限公司_電動平車_軌道平車_工業(yè)地平車生產(chǎn)廠家")

返回列表
可全向移動agv小車顧名思義是在二維空間內(nèi)可以任意運(yùn)行的一種車輛,。
一般應(yīng)用于高端設(shè)備的組裝對接和狹小空間的工件轉(zhuǎn)運(yùn),,因其轉(zhuǎn)彎靈活,適應(yīng)性較強(qiáng),,廣泛應(yīng)用于航天制造,、冶金化工、生物制藥等一些高端制造業(yè)中,。
一,、技術(shù)參數(shù)
| 序號 | 形式要求 | |
| 1 | 整體構(gòu)造 | 移動與升降一體式 |
| 2 | 運(yùn)行方式 | 輪式(舵輪) |
| 3 | 舵輪數(shù)量 | 4輪 |
| 4 | 載重量(噸) | 10 |
| 5 | 沖擊載荷(噸) | 15 |
| 6 | 載重面外形尺寸(mm) | 3200*2200 |
| 9 | 車輪直徑(mm) | ≥280 |
| 10 | 車輪寬度(mm) | ≥160 |
| 11 | 整車高度(mm) | ≤650 |
| 12 | 運(yùn)行速度(m/min) | 0-25 (可調(diào)速度旋鈕) |
| 13 | 離地高度 | ≥50mm |
| 14 | 移動方向 | 全方位移動 |
| 15 | 轉(zhuǎn)彎方式 | 移動轉(zhuǎn)彎且360°原地轉(zhuǎn)彎 |
| 16 | 越障能力 | 整車可以越過寬90mm的鐵軌地溝 |
| 17 | 升降方式 | 液壓剪式升降(帶泄壓保護(hù)裝置) |
| 18 | 舉升部位 | 上臺面舉升 |
| 19 | 升降行程(mm) | ≥400 (帶高度限位) |
| 20 | 操作方式(走行及升降) | 有線與無線兼容遙控器 |
| 21 | 停車定位精度 | ±5 mm |
| 22 | 轉(zhuǎn)彎電控控制方式 | 電器按鈕控制 |
| 23 | 驅(qū)動形式 | 伺服電機(jī)驅(qū)動 |
| 24 | 剎車方式 | 電磁剎車 |
| 25 | 供電方式 | 鋰電池(免維護(hù)) |
| 26 | 續(xù)航能力 | 滿載連續(xù)運(yùn)行大于4H(48V320Ah) |
| 27 | 充電時間 | <5小時充滿,防過充的功能 |
| 28 | 鋰電池壽命 | 循環(huán)次數(shù)2000 (容量≥80%標(biāo)稱容量) |
| 29 | 報(bào)警裝置 | 聲光報(bào)警 |
| 30 | 安全裝置 | 遇障礙物自動停車(0?2000mm可調(diào)節(jié)) |
| 31 | 平車保護(hù) | 過壓,、欠壓,、過流保護(hù) |
| 32 | 相對濕度 | 10%-90% |
| 33 | 環(huán)境溫度(°C) | -60 |
| 34 | 適應(yīng)海拔(m) | 2500 |
| 35 | 車體顏色 | 黃色+警示標(biāo)志 |
| 36 | 其他功能 | 急停開關(guān)、駐車制動 |
二,、設(shè)計(jì)圖紙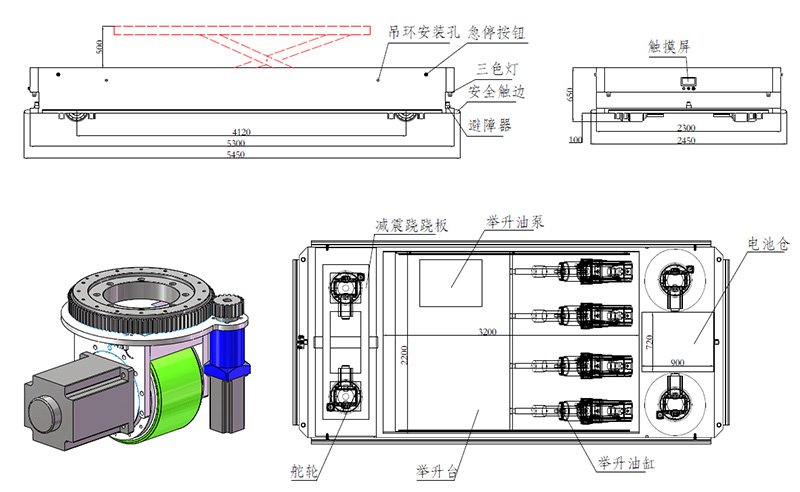 1)機(jī)械部分
1)機(jī)械部分
機(jī)械部分包括車體,、控制面板、四舵輪,、減震蹺蹺板,、鉸鏈緩沖機(jī)構(gòu)、電池,、控制柜等,。
agv小車主體結(jié)構(gòu)采用矩形管材結(jié)構(gòu)焊接而成,車體車架連接橋架部分主材選用矩形管組焊成形,,經(jīng)過有限元分析,,強(qiáng)度、剛度均滿足設(shè)計(jì)要求,。
控制面板用于安裝系統(tǒng)完成各類動作的控制按鈕,、系統(tǒng)狀態(tài)指示燈、急停按鈕等,,并注有相關(guān)操作標(biāo)識,。
驅(qū)動結(jié)構(gòu)采用四舵輪結(jié)構(gòu),可實(shí)現(xiàn)車體的前進(jìn),、后退,、轉(zhuǎn)彎,、原地旋轉(zhuǎn)等運(yùn)動。
舵輪是集成了驅(qū)動電機(jī),、轉(zhuǎn)向電機(jī),、減速機(jī)等一體化的機(jī)械結(jié)構(gòu),舵輪集成化高,、適配性強(qiáng),、配合同款伺服控制系統(tǒng)(控制器、伺服驅(qū)動器),,可快速部置AGV,、移動式機(jī)器人。系統(tǒng)均選用具有電磁抱閘功能的驅(qū)動電機(jī)和轉(zhuǎn)向電機(jī),,能夠有效地防止由于車體斷電造成平臺發(fā)生移動,,影響車體平臺上的拆裝和停放作業(yè),進(jìn)而提高操作的穩(wěn)定性及安全性,。
2)電氣控制系統(tǒng)
agv小車電氣控制系統(tǒng)主要由硬件與軟件兩部分組成,。
硬件部分主要包括主控制柜、PLC控制器,、觸摸屏,、磷酸鐵鋰電池、避障傳感器,、手持遙控器,、接收器、伺服控制系統(tǒng),,車載充電連接器等,。
軟件部分主要包含PLC控制軟件及觸摸屏組態(tài)軟件。
agv小車系統(tǒng)PLC可對各類開關(guān)量信號,、模擬量信號進(jìn)行實(shí)時數(shù)據(jù)采集,,A/D轉(zhuǎn)換、并經(jīng)過相應(yīng)的控制邏輯運(yùn)算實(shí)現(xiàn)系統(tǒng)各功能控制邏輯關(guān)系,,同時通過以太網(wǎng)通訊可實(shí)現(xiàn)與上位機(jī)人機(jī)交互,。系統(tǒng)采用電氣自動控制不僅能減少安裝工作量,且針對控制所需修改調(diào)整方便,,具有操作簡易,,適應(yīng)性強(qiáng),可靠性高,,抗干擾能力強(qiáng)的特點(diǎn),,尤其是靈活與擴(kuò)展方面比傳統(tǒng)的手動控制方式更具有優(yōu)勢。同時系統(tǒng)預(yù)留WiFi,、以太網(wǎng)接口等擴(kuò)展口,,便于后期系統(tǒng)功能擴(kuò)展。